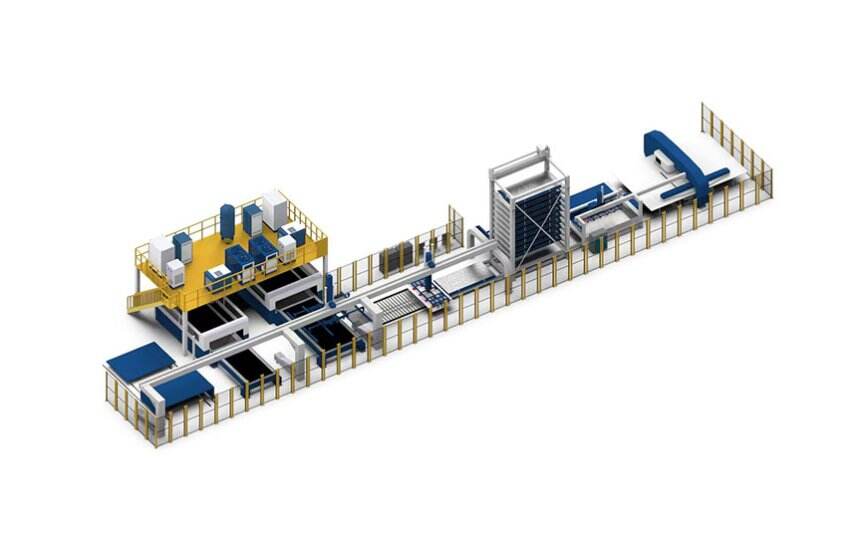
1. يقدم خط إنتاج ألواح المعدن من STON حلًا متكاملًا، حيث يدمج فك اللفائف، والتسوية، والتقطيع بالليزر، والثقب، والثني، واللحام في نظام كفء واحد.
2. يغطي هذا الخط كل مراحل معالجة ألواح المعدن، ويستجيب لمتطلبات الإنتاج ذي الكفاءة العالية والإنتاج الضخم.
3. مجموعات مختلفة، يمكن للوحدة قطع الليزر أن تشكل خط إنتاج آلي مع ماكينة ثني المعادن، وآلة ثني الألواح، والماكينة CNC ذات الفتحة الدوارة
4. تقديم مراجعة مجانية قبل البيع وحلول تقنية بناءً على رسومات المنتج
5. خيارات أوتوماتيكية متعددة متاحة، مثل الهياكل أو ذراع الروبوت
مخصص، يتم تحديد مواصفات خط الإنتاج وفقًا لحجم لفائف الصلب، الوزن، نوع المادة وسمكها بالإضافة إلى رسومات المنتج.
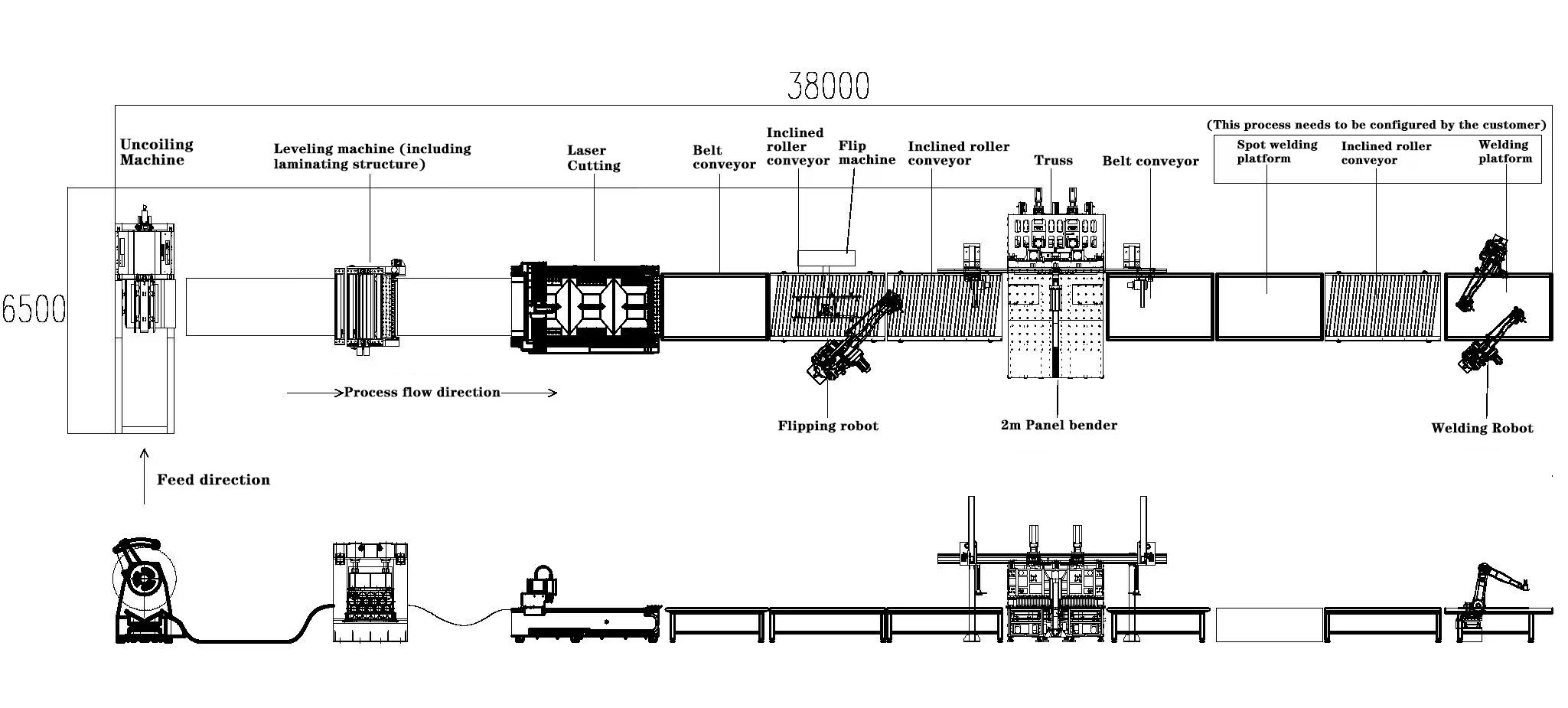
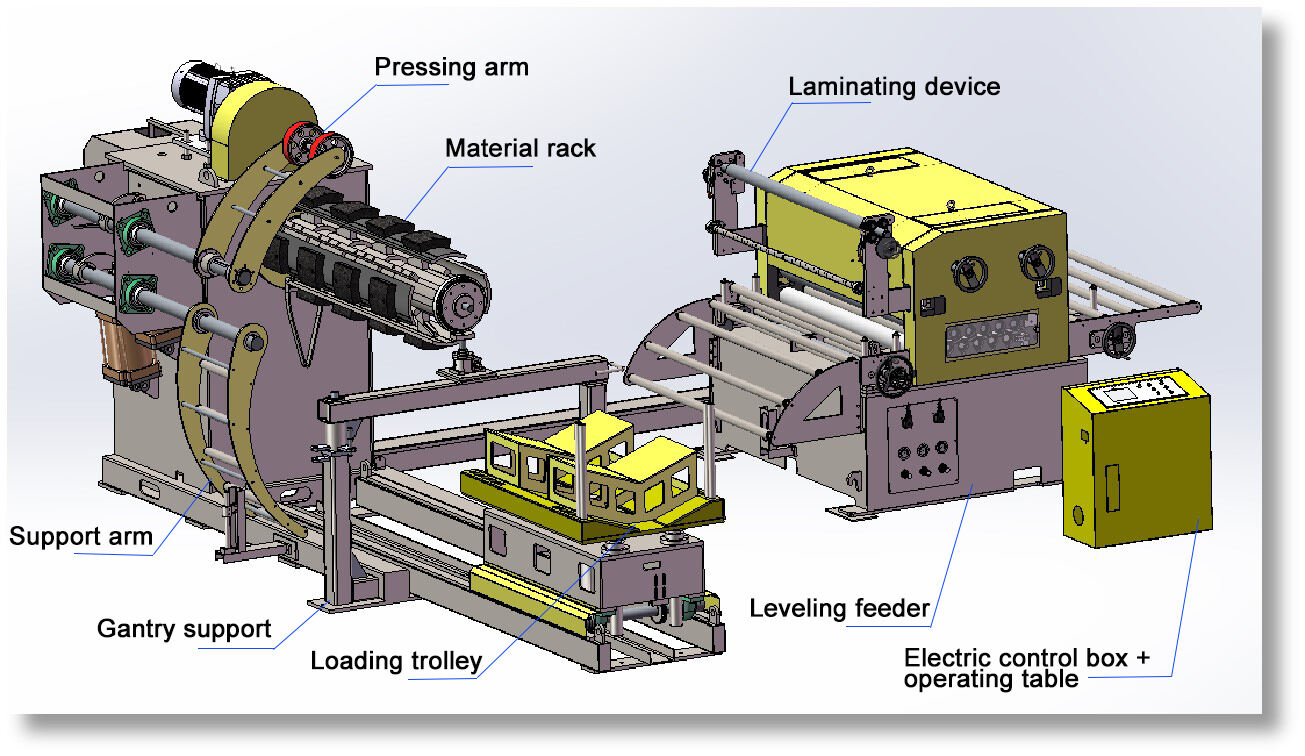
رسم تخطيطي لهيكل خطة خط الإنتاج (بأخذ ماكينة ثني ألواح بطول 2 متر كمثال)
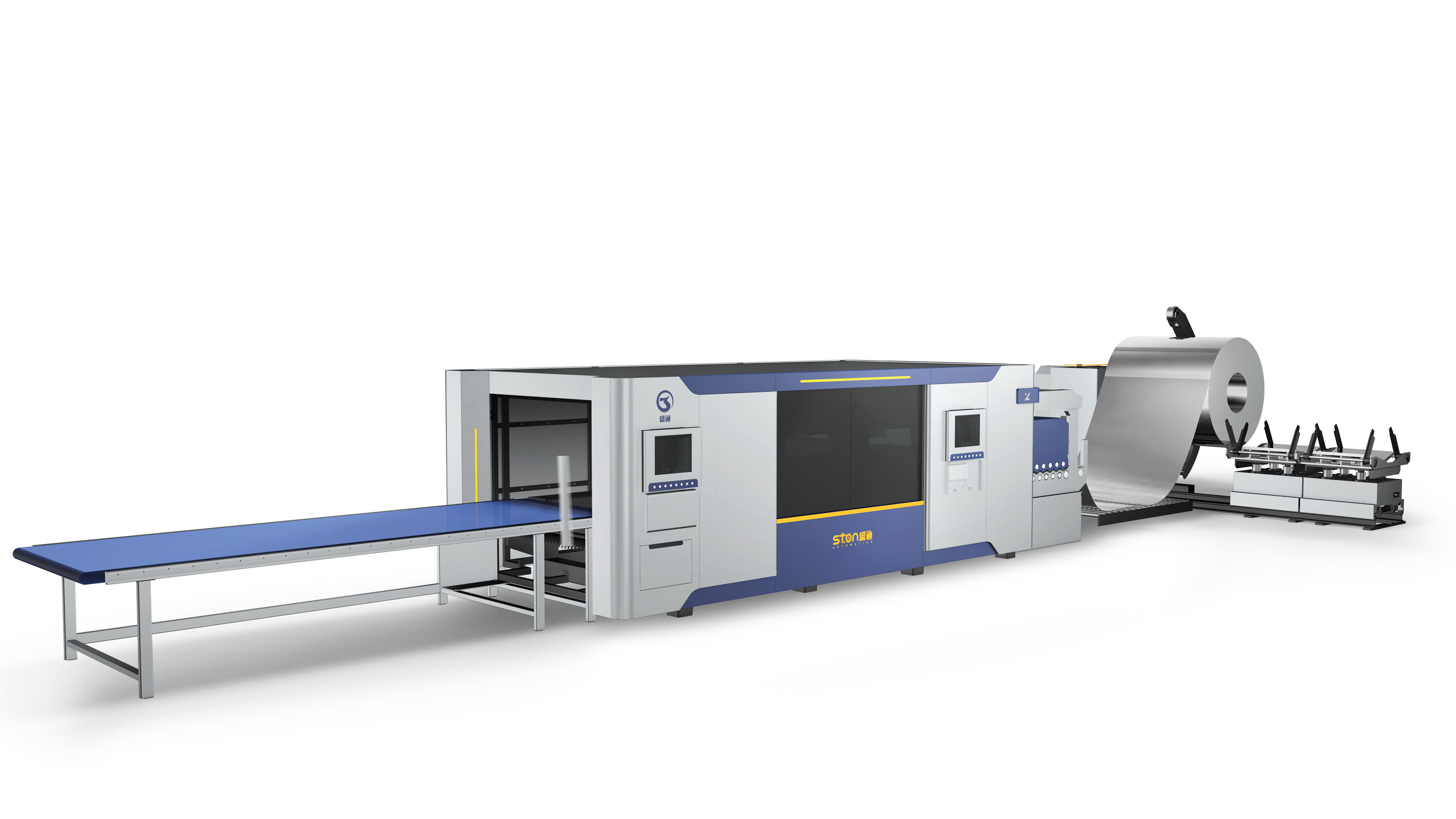
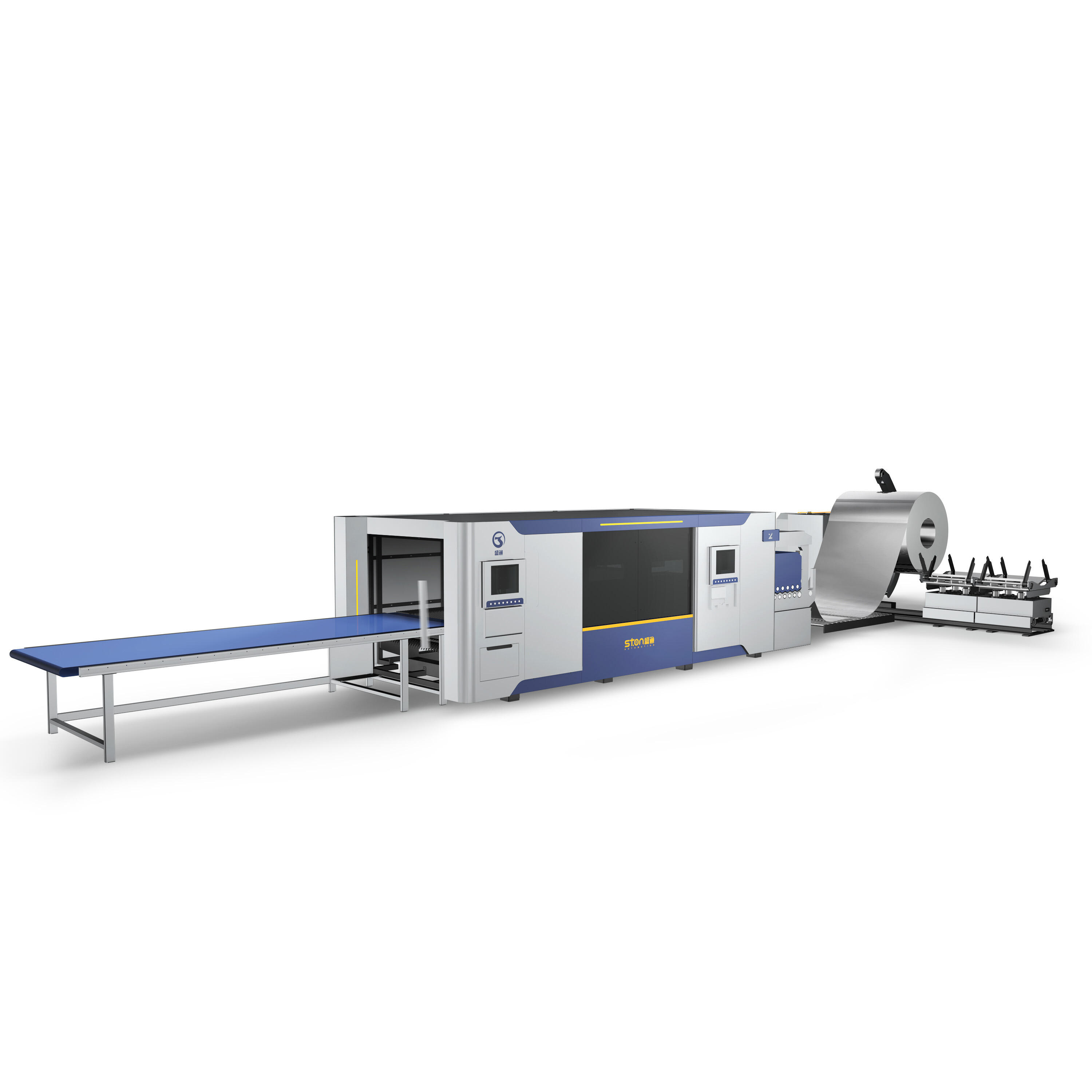
وحدة فك لفائف المعدن وتسوية الألواح
|
جهاز فك اللفائف الرف |
جهاز تسوية |
يمكن للمعدات المسؤولة عن التسوية تسوية ألواح المعدن غير المتوازنة. من خلال التنسيق الدقيق لمجموعات متعددة من الأسطوانات، يمكنها القضاء بفعالية على العيوب الموجية والملتوية على سطح اللوحة، مما يضمن أن تكون درجة استواء اللوحة مطابقة للمعايير عالية الدقة، ويضع أساسًا جيدًا للعمليات اللاحقة.
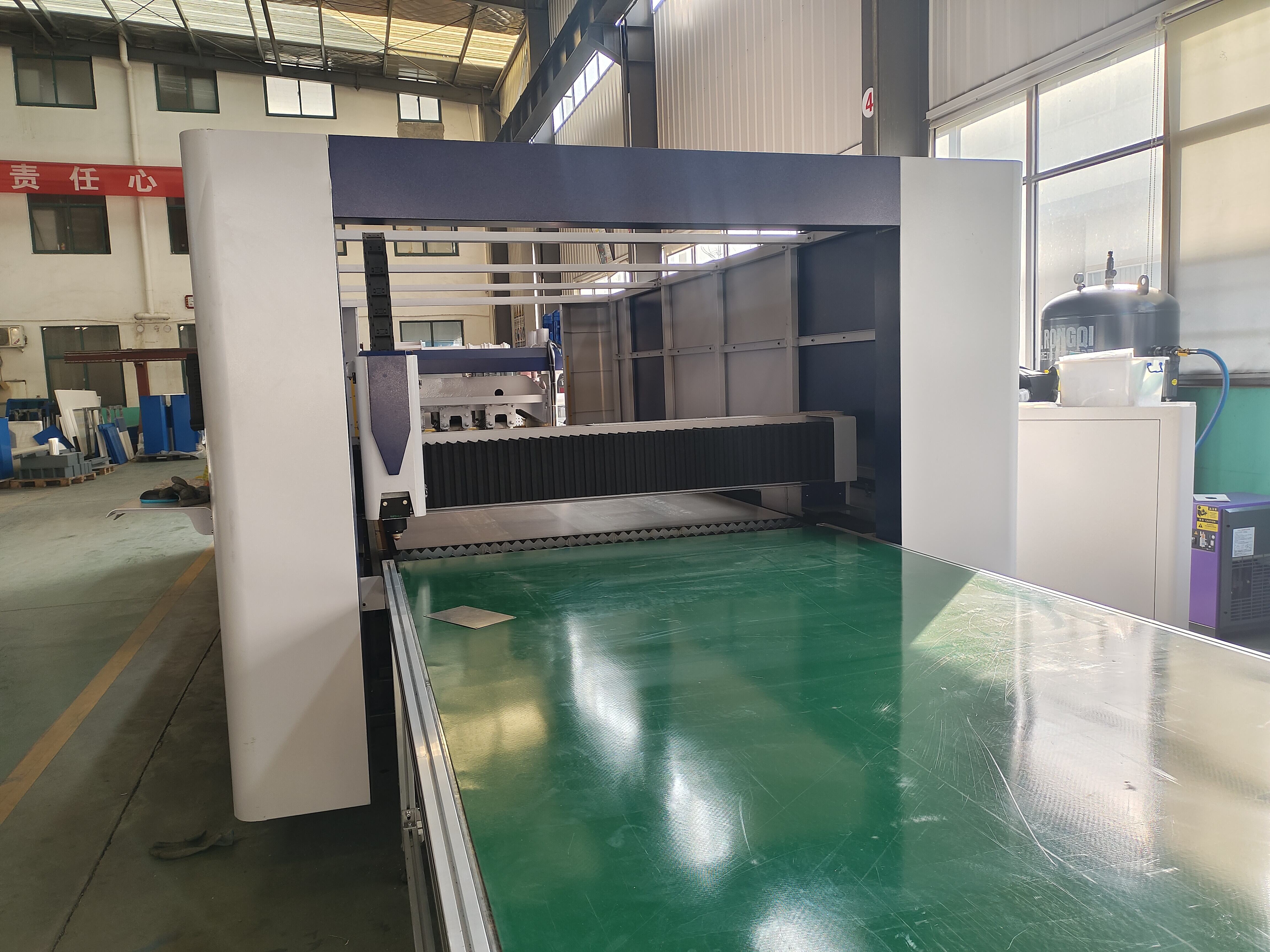
وحدة قص الليزر وإزالة الخام
تدخل الصفيحة المسطحة وحدة قطع الليزر. تُجهز الوحدة بتقنية متقدمة لقطع الليزر ويمكنها قص المعادن بشكل دقيق وفقًا لبرنامج القطع المعد مسبقًا. سواء كانت الأشكال الهندسية المعقدة أو محيطات الأجزاء ذات الهياكل الدقيقة، يمكن فصلها بسرعة ودقة باستخدام الكثافة العالية لطاقة الليزر، وأطراف القطع تكون ناعمة ويمكن أن تصل الدقة إلى مستوى المليمتر أو حتى أعلى. في الوقت نفسه، يعمل النظام الروبوتي بالتعاون الوثيق مع وحدة قطع الليزر. وبفضل ذراعه الروبوتية المرنة وقدراته الدقيقة في الإمساك والتوجيه، يمكنه إكمال عمليات تحميل وتفريغ الصفيحة بسرعة واستقرار، مما يزيد بشكل كبير من كفاءة الإنتاج في عملية القطع.
 |
 |
3.وحدة ثني وتشكيل
تُرسل قطع المعدن المقطوعة بعد ذلك إلى ماكينة ثني الكهرباء الهيدروليكية بواسطة الروبوت. وبفضل نظام القيادة الهيدروليكي القوي ونظام التحكم الدقيق، يمكن لماكينة الثني الكهربائية الهيدروليكية أن تثني قطع المعدن الصلب بزوايا وانحناءات متعددة حسب متطلبات المنتج. سواء كان الثني زاوية بسيطة قائمة أو منحنيًا معقدًا أو شكل متعدد الطيات، يمكن تحقيق تشكيل دقيق عن طريق التحكم الدقيق في زاوية الثني والقوة.
للاحتياجات الانحناء الأكثر تعقيدًا ودقة عالية، يلعب مركز الانحناء المرن دورًا رئيسيًا. فهو يدمج تقنية CNC المتقدمة والخوارزميات الذكية، ويمكنه التبديل السريع بين قوالب الانحناء المختلفة والمعلمات المعالجة لتحقيق معالجة انحناء فعالة لإطارات الألواح المعدنية بجميع المواصفات والأشكال. وعلى مدار عملية الإنتاج، يستمر الروبوت في العمل كـ"جسر" لنقل المواد، بنقل أجزاء ألواح المعادن بمرنة بين مختلف المعدات لضمان عمليات إنتاج سلسة وكفؤة.
 |
 |
4.وحدة اللحام والتجميع
يقوم الروبوت بنقل قطع المعادن المثنيّة إلى محطة تشكيل اللحام بواسطة الماني퓰اتور. تجهيز معدات تشكيل اللحام بالمانيبيولاتور بنظام لحام دقيق ونظام تتبع بصري، يمكنه اختيار العملية اللحام المناسبة (مثل اللحام القوسي بالأرجون، اللحام النقطي، إلخ) والمعامِل اللحام تلقائيًا وفقًا لمتطلبات اللحام للقطع المعدنية. أثناء عملية اللحام، يقوم نظام التتبع البصري بمراقبة موقع اللحام في الوقت الفعلي ويدفع المانيبيولاتور لإكمال عملية اللحام بدقة، مما يضمن أن يكون اللحام موحدًا ومتينًا وأن جودة اللحام مستقرة وموثوقة.

خلال عملية الإنتاج التلقائي بالكامل، يتم تحقيق تفاعل ومشاركة البيانات في الوقت الفعلي بين الهيكل والذراع الروبوتية ومركز ثني المعدن المرن من خلال تقنيات الاتصال مثل شبكة الصناعة الإيثيرنت وغيرها، ويتم إدارة وتوجيه هذه العمليات بشكل موحد بواسطة نظام التحكم المركزي. يقوم نظام التحكم المركزي بتحسين الديناميكي للعملية الإنتاجية بناءً على بيانات متعددة الأبعاد مثل خطة الإنتاج، حالة المعدات، معلومات المواد وما إلى ذلك، وترتيب مهام العمل لكل معدة بشكل معقول لضمان التشغيل الكفء والاستقرار للعملية الإنتاجية بأكملها، مما يعزز بشكل كبير مستوى الأتمتة وكفاءة الإنتاج في تصنيع المعادن المسطحة.
5.وحدة نقل المواد والأتمتة
هناك نوعان من التحميل والتفريغ الآلي: الهيكل والذراع الروبوتية
(1)الذراع الروبوتية تلتقط أجزاء المعادن المسطحة التي تم معالجتها من قبل عن طريق التسوية، والتقطيع بالليزر، والعمليات الأولية الأخرى من منطقة المعالجة باستخدام مفاصلها المرنة وقدراتها في التوجيه الدقيق. يمكن تعديل جهاز الإمساك الموجود في نهاية الذراع الروبوتية وفقًا لشكل وحجم أجزاء المعادن المسطحة لضمان عملية إمساك سلسة وموثوقة ولتجنب تلف peace العمل. بعد الإمساك، تقوم الذراع الروبوتية بنقل أجزاء المعادن المسطحة بسرعة إلى موقع البداية على مسار ناقل الهيكل.
(2)اختيار أكثر اقتصادية. بفضل هيكلها المستقر وسعتها التحميلية القوية، تقوم الهيكلية بنقل الأجزاء المعدنية إلى مركز ثني المرونة عبر المسار المحدد مسبقًا. تُجهَّز هذه الهيكلية بنظام تشغيل خطي بدقة عالية يعتمد على المحركات المERVدومة، مما يمكنها من تحقيق حركة خطية سريعة ومستقرة، ويمكنها ضبط السرعة والوضع بشكل مرناً وفقًا لاحتياجات الإنتاج لضمان تسليم الأجزاء المعدنية بدقة إلى محطة التحميل في مركز الثني المرن.



 EN
EN
 AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 ID
ID
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 AZ
AZ
 EU
EU
 KA
KA
 BN
BN
 LO
LO
 LA
LA
 MN
MN
 NE
NE